
 产品:12
产品:12

一、配置UOP信号
1)依次按键操作: MENU- SETUP- -1/0- -UOP,F2切换到CONFIG状态(按F3IN/OUT切换输入 输出信号到UI)
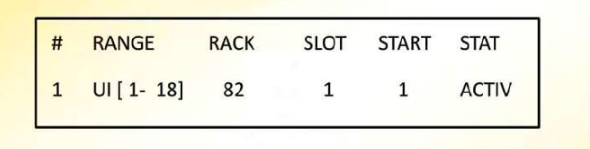
3)切换到U0继续分配完毕,重启机器人。重启后状态(STAT) 为ACTIV则信号正常
二,设置HOME点,让PLC知道机器人准备好
当机器人在原点(安全位置)时,给PLC发送UO[7](AT PERCH)信号。
设置步骤:
1)设定参考点(Ref Position);机器人在参考点时UO[7]为ON
2)设定位置寄存器(PR)中的HOME位置;方便在程序中调用参考点
Ref Position3;
注:
当机器人在Ref Position1位置时,系统指定的UO[ 7 ](AT PERCH)将发信号给外部设备,但到达其他Ref Position位置的输出信号需自己来定义。当机器人在Ref Position位置时,相应的Ref Position1, RefPosition2,Ref Position3可以用DO或RO给外部设备发信号。
三,如何用外部信号停止和启动程序?
停止程序:
UI[4] Cycle Stop:循环停止信号,停止当前执行的程序。
启动信号:
外部开始信号(START)重新开始当前中断的程序。
暂停程序:
暂停信号(HOLD)中断时暂停正在运行的程序
紧急停止程序:
紧急停机信号(IMSTP)中断时紧急停机
允许移动机器人:
使能信号(EnaBle)为0N时允许移动
四,如何用外部信号选择并自动执行程序?
方法一,自动运行方式: RSR
机器人需求信号(RSR1-RSR8)选择和开始程序。
特点:
1)当一个程序正在执行或中断,被选择的程序处于等待状态,一旦原先的程序停止,就开始运行被选择的程序。
2)只能选择8个程序。
方法二,自动运行方式: PNS
程序号码选择信号(PNS1-PNS8和PNSTROBE)选择- -个程序。
特点:
1)当一个程序被中断或执行,这些信号被忽略。自动开始操作信号(PROD_ START)开始从**-行执行一个
被选择的程序,当一个程序被中断或执行,这个信号不被接受。
2)可以选择255个程序。
来源:网络
更多资讯:发那科机器人